# 变量代换
在引入积分问题之前,先思考如何改变曲面片的参数化的变量
称 C∞ 映射 f:U(⊂Rm)→V(⊂Rn) 为 微分同胚 (Diffeomorphism)「微分同相」,当且仅当 f 是双射,并且 f 与 f−1 都是光滑映射
命题
令 E 为 s−t 平面 R2 中的非空开集,D 为 u−v 平面 R2 中的非空开集,σ:D→R3 为曲面片的参数化。
若 Φ:E→D 是一个微分同胚,那么 σ∘Φ:E→R3 也是一个曲面片的参数化,并且 σ(E)=(σ∘Φ)(E)
证明
设 τ:=σ∘Φ,作为复合映射,显然 τ 是光滑且单射的
利用复合映射的偏微分,有
τs(s,t)=∂s∂uσu+∂s∂vσv,τt(s,t)=∂t∂uσu+∂t∂vσv
计算向量积
τs(s,t)×τt(s,t)=(∂s∂uσu+∂s∂vσv)×(∂t∂uσu+∂t∂vσv)=(∂s∂u∂t∂v−∂t∂u∂s∂v)σu×σv=JΦ(s,t)⋅σu×σv
由于 Φ 是微分同胚,所以 Jacobian 行列式 JΦ(s,t)=0,又由于 σ 是曲面片的参数化,所以 σu×σv=0,因此 τs(s,t)×τt(s,t)=0,τ 也是一个曲面片的参数化
□
通过这样的方法,参数化 σ 变成了新的参数化 σ∘Φ,称这样的操作为 变量代换 (Change of Variables)「変数変換」
- 称该代换是保持方向的,当且仅当 JΦ(s,t)>0 对任意 (s,t)∈E 都成立
- 此时 nσ∘Φ(s,t)=nσ(u,v)
- 称该代换是改变方向的,当且仅当 JΦ(s,t)<0 对任意 (s,t)∈E 都成立
- 此时 nσ∘Φ(s,t)=−nσ(u,v)
示例
一般地,由正则矩阵 A 给出的线性映射
Φ:R2→R2,Φ(s,t)=A(st)
是一个微分同胚,且 JΦ(s,t)=detA 是常数
- 当 detA>0 时,Φ 是保持方向的变量代换
- 当 detA<0 时,Φ 是改变方向的变量代换
# 曲面积分
类似于在正则曲面之前引入了曲面片,曲面片作为曲面的基本单位,具备参数化的能力,这使得其法向量场可以由参数化的偏微分稳定给出
令 S⊂R3 为以 σ:D→R3 参数化的曲面片
我们来分析一下如何计算曲面片 S 上的面积:
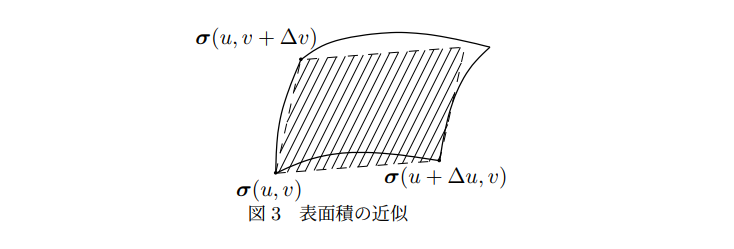
考虑位于点 σ(u,v) 处的一个小片段
![曲面积近似示例]()
考虑偏微分向量积的模长
∥σu(u,v)×σv(u,v)∥=∥∥∥∥∥△u,△v→0lim△uσ(u+△u,v)−σ(u,v)×△vσ(u,v+△v)−σ(u,v)∥∥∥∥∥=△u,△v→0lim∥∥∥∥∥△uσ(u+△u,v)−σ(u,v)×△vσ(u,v+△v)−σ(u,v)∥∥∥∥∥=△u,△v→0lim∣△u∣⋅∣△v∣∥(σ(u+△u,v)−σ(u,v))×(σ(u,v+△v)−σ(u,v))∥
因此,当 △u 与 △v 足够小时,可以近似
∥(σ(u+△u,v)−σ(u,v))×(σ(u,v+△v)−σ(u,v))∥≈∥σu(u,v)×σv(u,v)∥⋅∣△u∣⋅∣△v∣
也就是说,令矩形 R:=[u,u+△u]×[v,v+△v],则 σ(R) 的面积近似为这里的曲面面积。
那么统合所有小矩形的面积近似,就可以得到曲面片 S 的面积近似
R∑∥σu(u,v)×σv(u,v)∥⋅∣△u∣⋅∣△v∣
定义
令 S⊂R3 为以 σ:D→R3 参数化的曲面片
设曲面的一部分 T⊂S 的原象可测,那么其 曲面积 (Surface Area)「曲面積」 定义为
Area(T)=∬σ−1(T)∥σu(u,v)×σv(u,v)∥dudv
从上述结果不难看出,曲面积分上的基本单位为 dA=∥σu(u,v)×σv(u,v)∥dudv,对于标量场的面积分,只需要给这个基本单位加上标量场的值。
但是对于向量场,类似向量场的曲线积分处理方式,需要将其与法向量场点积后再积分
一般地,曲面片上的积分按照如下给出
定义 曲面片的面积分
令 S⊂R3 为以 σ:D→R3 参数化的曲面片,T⊂S 的原象可测
- 定义 T 上连续标量场 f:T→R 的面积分为
∬TfdA=∬σ−1(T)f(σ(u,v))∥σu(u,v)×σv(u,v)∥dudv
- 定义 T 上连续向量场 F:T→R3 的面积分为
∬TFdA=∬σ−1(T)F(σ(u,v))⋅(σu(u,v)×σv(u,v))dudv
分别称
- dA=∥σu(u,v)×σv(u,v)∥dudv 为曲面片 S 上的 面积元素 (Area Element)「面積要素」
- dA=σu(u,v)×σv(u,v)dudv 为曲面片 S 上的 向量面积元素 (Vector Area Element)「ベクトル面積要素」
接下来是正则曲面的面积分问题。由于正则曲面上的点不一定都可以被一个曲面片参数化,因此无法直接套用上述定义来计算面积分。
令 S 为正则曲面。我们想要考虑某一个标量场或者向量场在 T⊂S 上的面积分
如果 T 是一个可以被正向参数化的曲面片,那么标量场和向量场的面积微元可以分别由下式给出
dA=∥σu(u,v)×σv(u,v)∥dudv,dA=σu(u,v)×σv(u,v)dudv
但是通常来说无法默认 T 是一个曲面片。因此可以类似于曲线积分中分段光滑的概念,考虑 T 是否可以被多个曲面片分割。
定义 正则曲面的面积分
令 S 为 R3 中的正则曲面,T⊂S,设存在一系列子集 T1,T2,⋯,Tn⊂S 满足
- T=⋃i=1nTi
- 每个 Ti 都可以被一个曲面片参数化,即存在 σi:Di→R3 使得 σi(Di)=Ti,并且 Di 可测
- i=j 时,Ti∩Tj 的面积为零
那么,定义沿曲面 T 的
- 标量场 f:T→R 的面积分为
∬TfdA=i=1∑n∬TifdA
- 向量场 F:T→R3 的面积分为
∬TFdA=i=1∑n∬TiFdA
这样一来,正则曲面的面积分问题转为多个曲面片的面积分问题。用求和符号可以改写为
∬TfdA∬TFdA=i=1∑n∬Dif(σi(u,v))∥σi,u(u,v)×σi,v(u,v)∥dudv=i=1∑n∬DiF(σi(u,v))⋅(σi,u(u,v)×σi,v(u,v))dudv
# Stokes 定理
Stokes 定理一定程度上可以说是 Green 定理的曲面推广
定理 Stokes 定理
令 S 为以 σ:D→R3 参数化的曲面片
领域 Ω⊂D 的边界 ∂Ω 是由分段光滑的正则单纯闭曲线 C0,C1,⋯,Cℓ 组成的,并且满足 Ω⊂D
那么经由 σ 的映射,各个像 σ(Ci) 也是分段光滑的正则单纯闭曲线,且在 S 中包围了一个区域 σ(Ω)
此时,对于定义在 U⊃σ(Ω) 上的连续向量场 F:U→R3,有
∬σ(Ω)curlF⋅dA=i=0∑ℓ∫σ(Ci)F⋅dx
证明
Stokes 定理的正式证明将在微分形式的章节给出,此处暂时省略
□
作为一个特例,Stokes 在闭曲面上的结论广为人知
定义
称正则曲面 S 是 封闭曲面 (Closed Surface)「閉曲面」,当且仅当 S 是有界的,且是闭集
在开始给出闭曲面上的 Stokes 定理之前,让我们接触三角剖分
定义 三角形
令 S 为正则曲面,σ:D→R3 为 S 的局部参数化
令 Ω⊂R2 满足 Ω⊂D,称像 σ(Ω) 是 S 上的一个 三角形 (Triangle)「三角形」,当且仅当 Ω 以三个正则曲线连接所得的单纯闭曲线作为边界的区域